Timber Pavilion competition winners offer up creative spaces to look into the material's future
By Josh Niland|
Tuesday, Jul 26, 2022

Buildner has named prize winners for its exciting new Timber Pavilion competition that was announced in November.
Three designs were honored along with a student award. The competition brief called for the design of a maximum 50-square-meter (538-square-foot) pavilion using timber to create a platform within which the history and potential of the material can be exhibited. Winning entries were commended by the competition’s jury for their creative approach to site selection, adaptation of space, and “potential to provide a template for how we should approach material usage in the future.”
Buildner chose an international selection of architects who work closely with the mass timber industries to judge the competition. They included O’DonnellBrown co-founder Sam Brown; CLOU architects founder Jan Clostermann; Katsuya Fukushima, the founder of Tokyo-based FT Architects; Ultramoderne Principal Aaron Forrest; Jürgen Mayer H., of J.MAYER.H Partner; and University of Stuttgart Ph.D. candidate Hans Jakob Wagner.
The full results can be viewed below. Keep scrolling to see more about each project with a brief description from the prize winners.
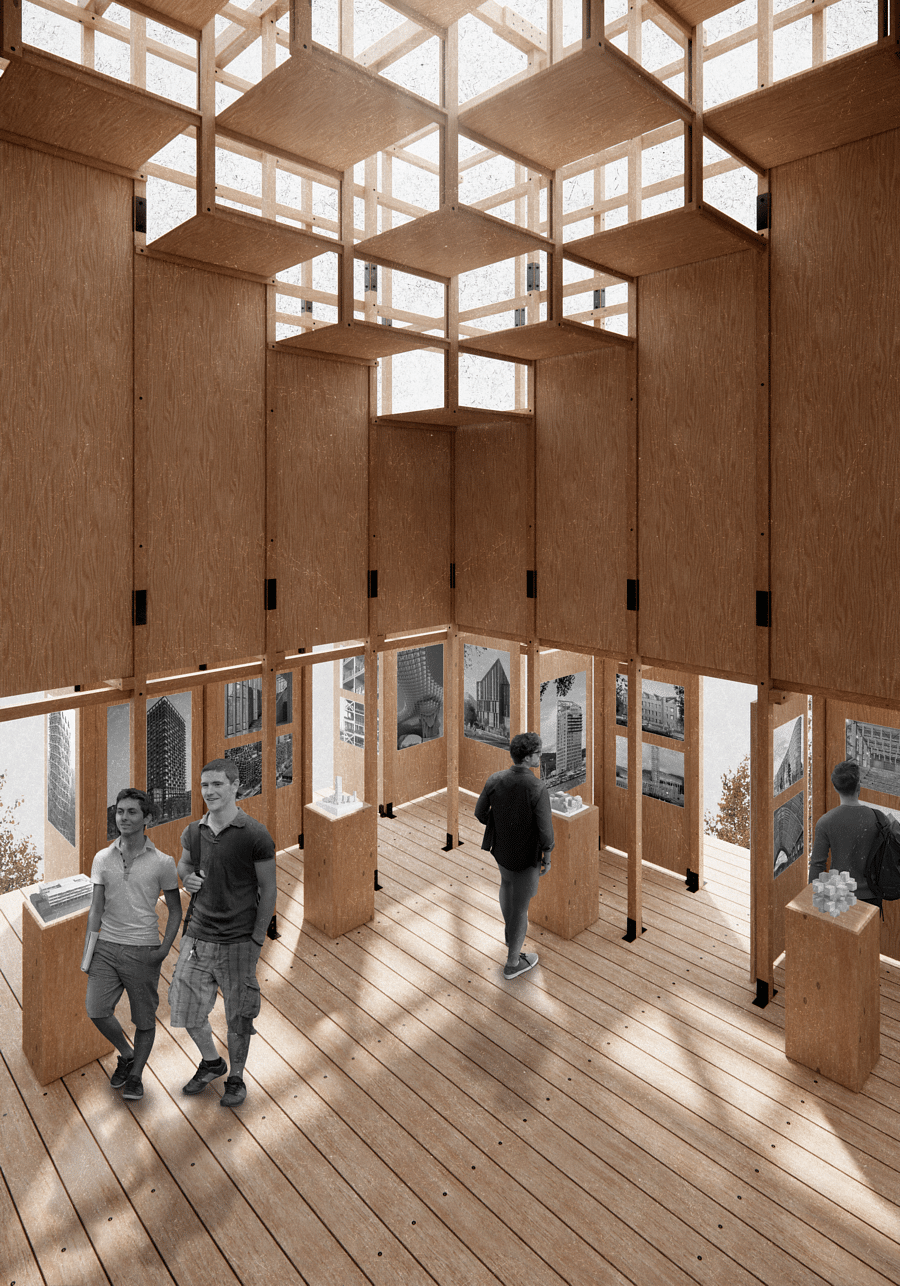
(Cover image) 1st Place + Aapparel Sustainability Award: Rough Cut: A Pavilion For The Re-Use And Future Of Timber by Emma Jurczynski (UK)
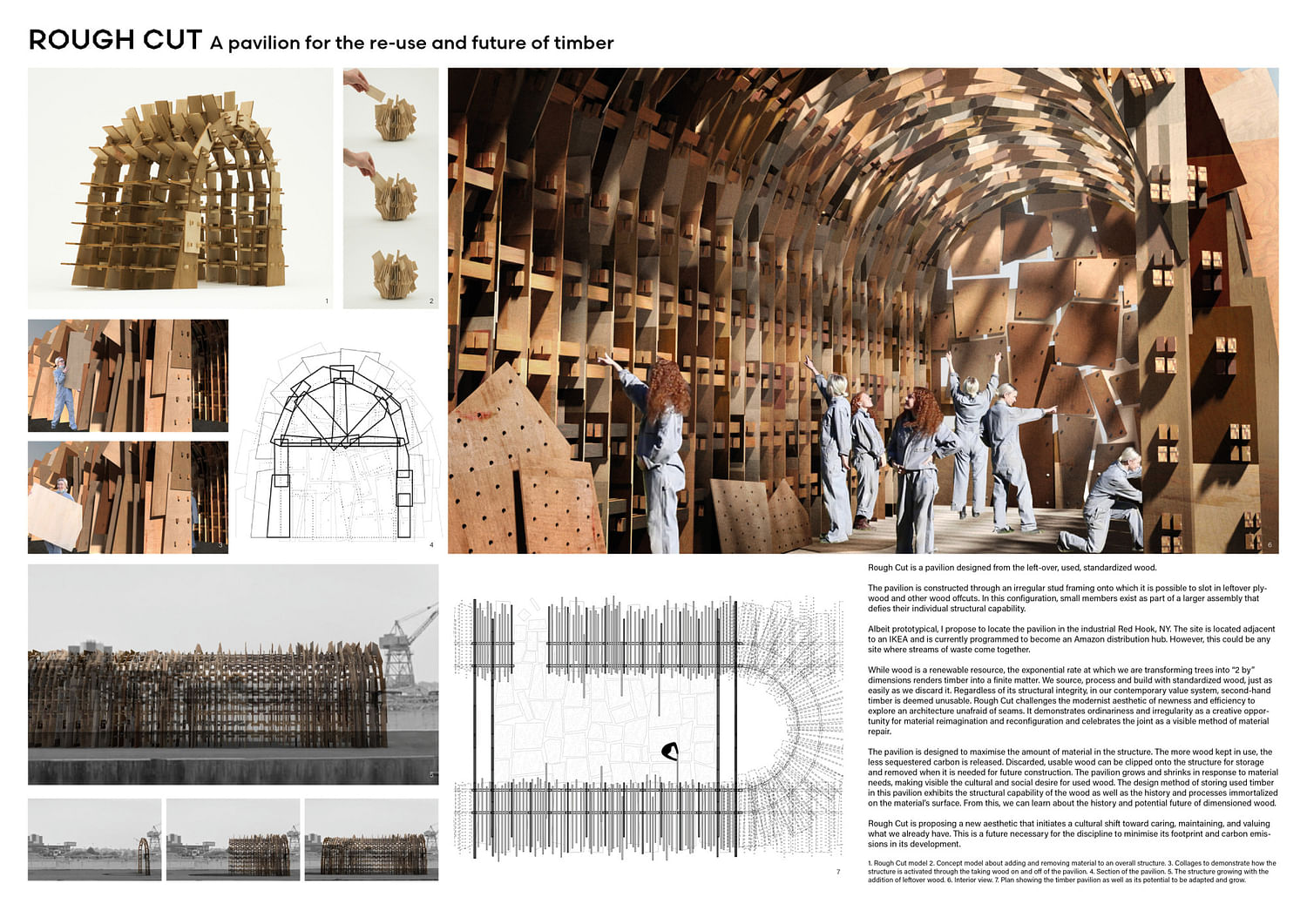
Jury commentary: "This submission embodies how we should be thinking about timber in the present day and future. The scrap and left overs in the buildings industry offer a huge potential to rethink the design process according to the availability of the construction material. The overall design concept is a framework that embraces a variety of building materials within its bold geometrical space. The project has the potential to provide a template for how we should approach material usage in the future. Quirky, playful and interactive, this unusual design promotes a commendable agenda for re-using timber. It proposes an open-end system, which cleverly uses the flexibility of wood and allows for the participation of various people in the making. It succeeds in creating an ample and casual space with such a small and simple system. On the other hand, the details of joints and the rules for each member are unclear. It feels as if it restricts the shape and size of the timber used for the structure even though its central concept is about reuse.”
Read Jurczynski's interview here.
2nd Prize Winner: Timber Pavilion — A Multi-Sensory Experience Of Wood by Matteo Fraticelli, Motomi Morii, Martin Lee (United States)
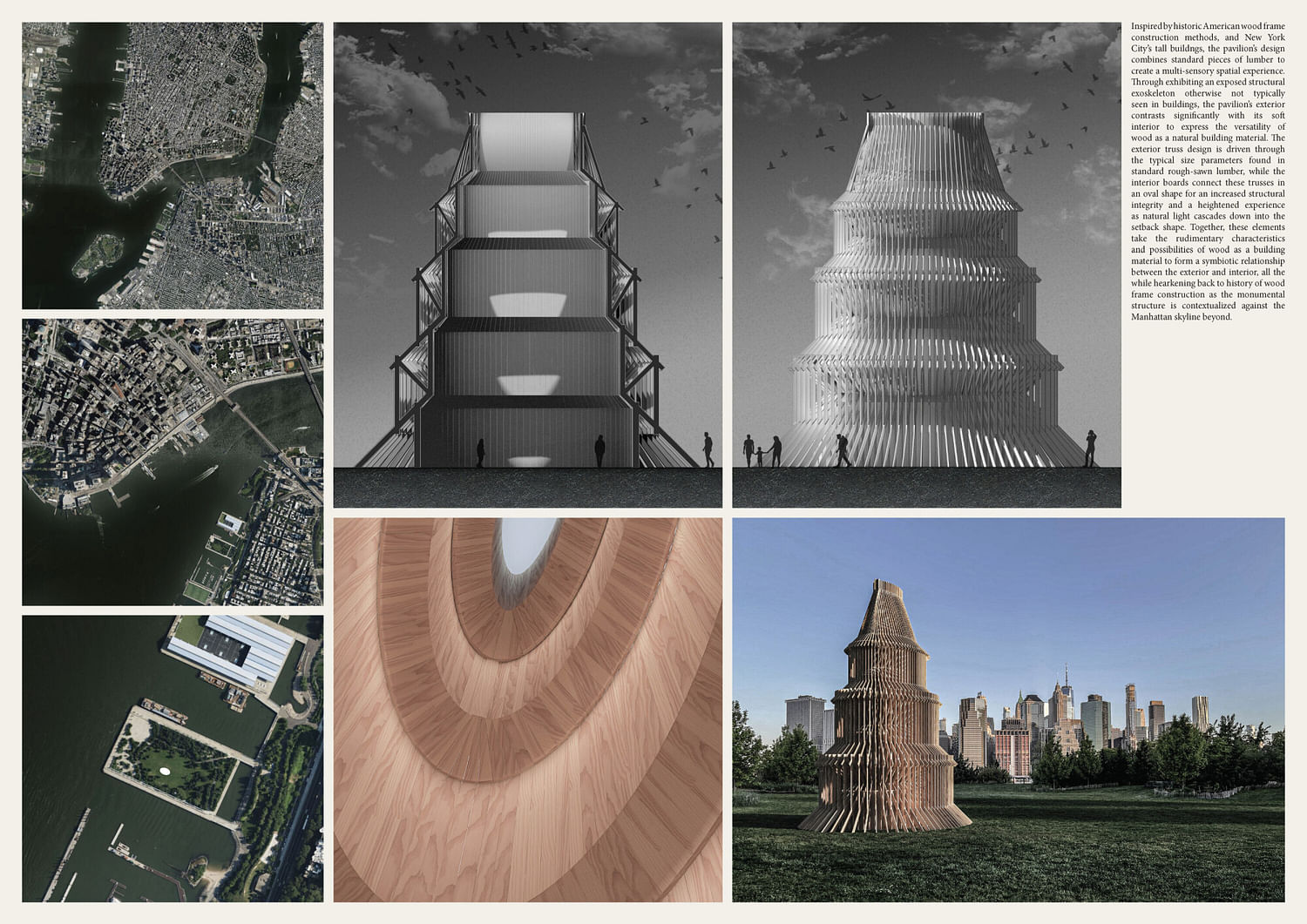

Jury commentary: “As a counterpart to the urban sculptures of high-rises in a metropolis this proposal provokes a dialogue in tension between the large scale skyline and an intimate place in a public space. Simple sticks refer to the history of timber construction in the US which nowadays seems to be mainly alive in mundane suburban homes. This project proposes a different direction. The project shows a beautifully rendered clear, innovative and realizable concept. It celebrates American wood frame construction, which excells in simplicity and efficiency. Yet typical details of wood frames are usually hidden, as their tectonic realization is not geared towards visibility but rather cost savings. As such, it would have been crucial to this project to come up with a frame connection detail that combines the historical roots of frame construciton but is articulated for high visibility - as these connections will dominate the appearance of the pavilion.”
Read their interview here.
3rd Prize Winner: Timber Ribbon by Will Gant, Michael Brudi, and Carly Le (United States)
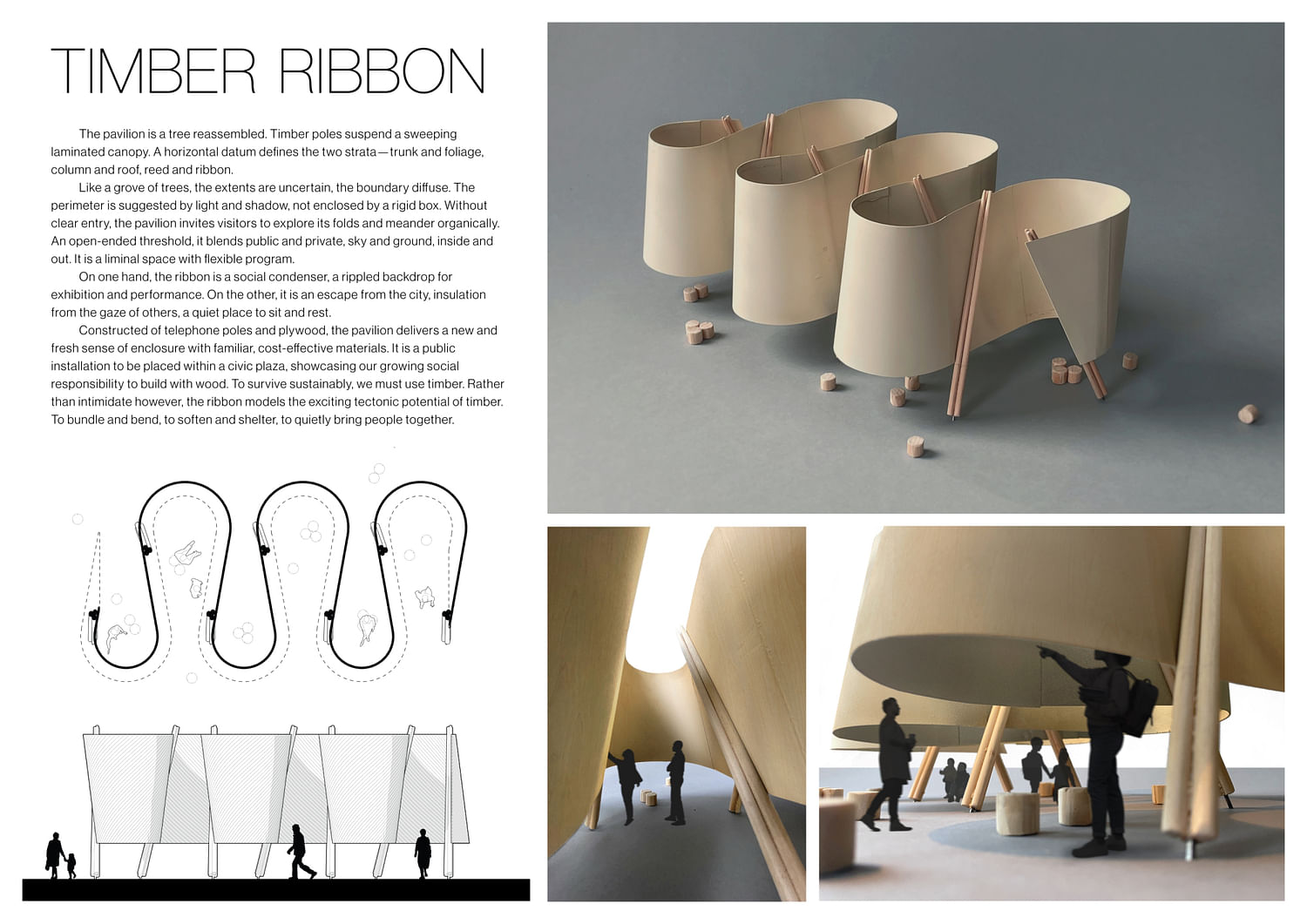

Jury commentary: "The pavilion delivers a new and fresh sense of enclosure with familiar, cost-effective materials.” The design features a series of semi enclosed spaces that intend to perform as social condensers and an escape from the city. The jury writes: “A beautiful concept that deserves to be engineered, tested, and built. Choosing a log and a curved surface is a creative choice when considering wood as a material. The space created from that choice loses the notion of inside and outside: creating a maze-like experience with such a simple design. The structural rationalities and the details of joints are unclear, however the proposal is fresh and strong enough to make up for these shortcomings.”
Read their interview here.
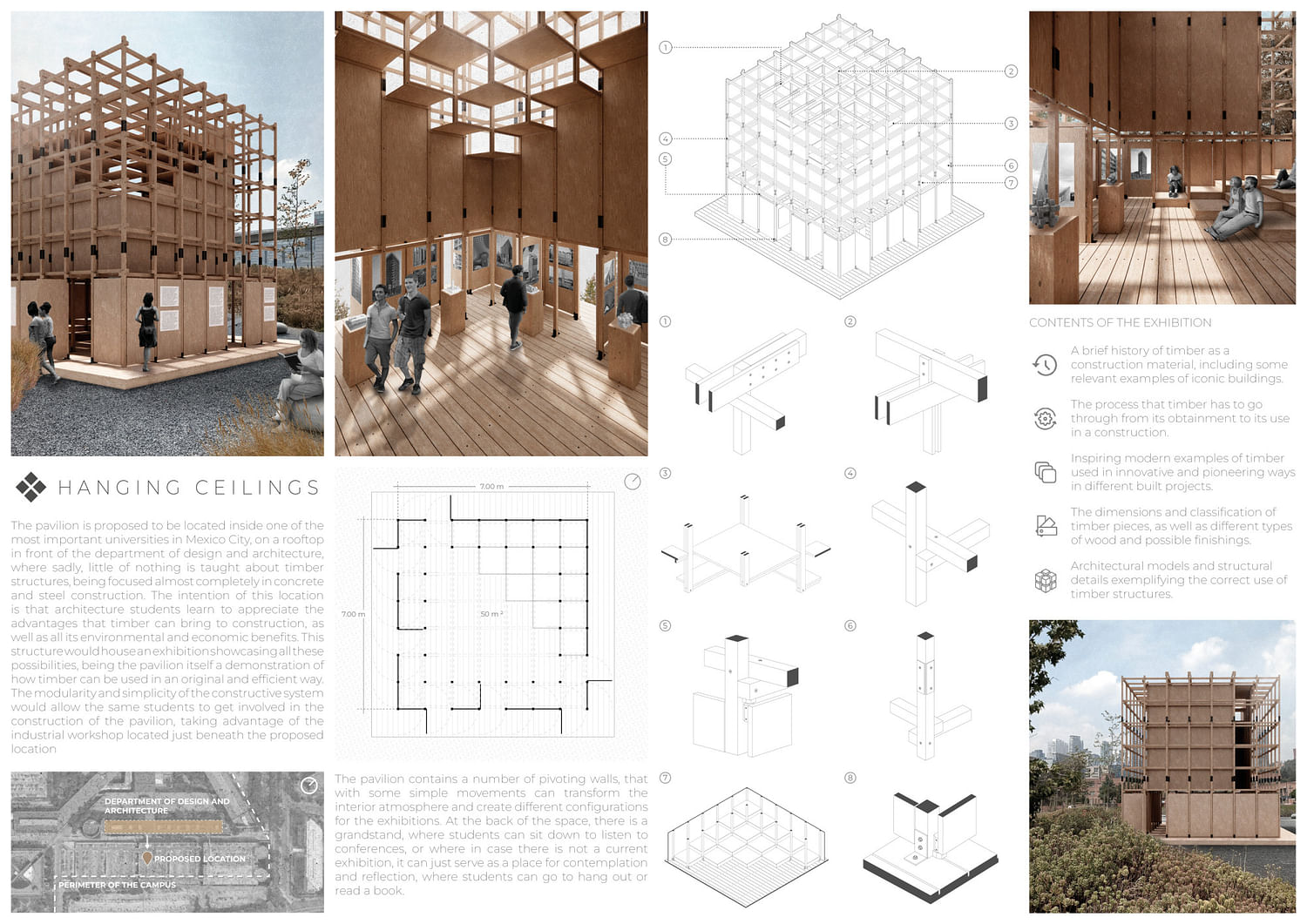
Archhive Student Award: Hanging Ceilings by Diego Sierra Mora (Mexico)
Read Mora's interview here.

Share
0 Comments
Comment as :