
A closer look at “Weave.X”, from the 2016 AA Summer DLAB: ORANGE
By Justine Testado|
Tuesday, Nov 29, 2016
The AA Summer DLAB continues its exploration of generative design in the 2016: ORANGE-themed workshop. A total of 21 student participants from 11 countries worked side by side during the three-week workshop, which happened at AA's London campus and Hooke Park this past July. Participants got to hone their computational design skills in developing an innovative strategy to construct 3-D interwoven concrete structures. With the guidance of AA DLAB tutors and collaborators, students also applied techniques related to geometry rationalization, material behavior, and robotic fabrication.
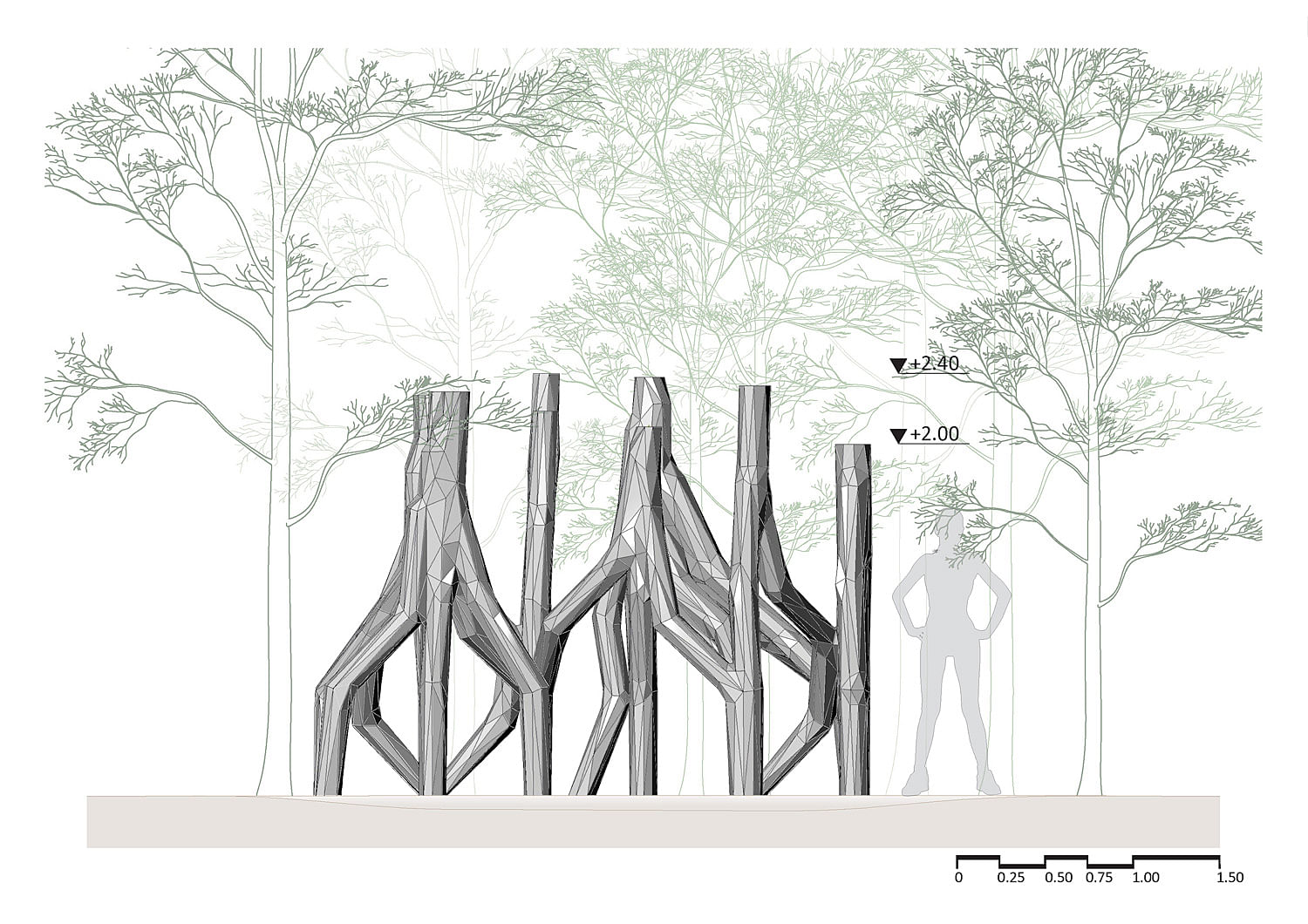
The workshop culminated with the creation of a full-scale, working prototype installation called “Weave.X”, which now stands on display in the midst of Hooke Park.
Scroll down for a recap of Weave.X's fabrication process.

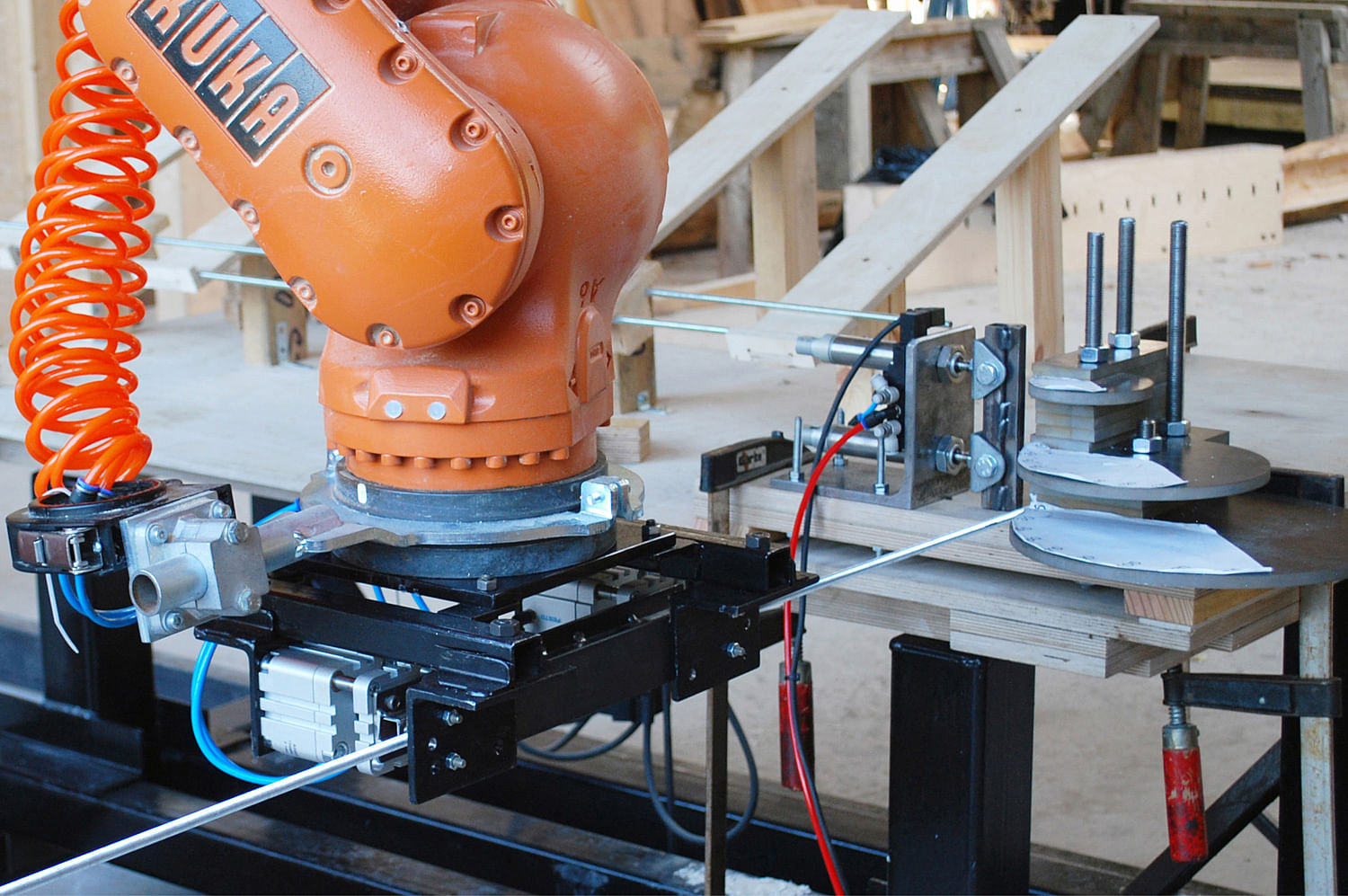
“Initial computational form-finding techniques explore the generation of a network of interwoven elements via a bundling algorithm developed in Grasshopper. The algorithm enables the user to locally differentiate the amount of connectivity between elements in discrete parts of the global configuration, a condition that can enhance structural performance. Simultaneously, an automated fabrication process is developed, where custom shaped steel reinforcement bars are bent using a 6 axis robot(KUKA KR- 150), custom built jig and pneumatic grippers.”
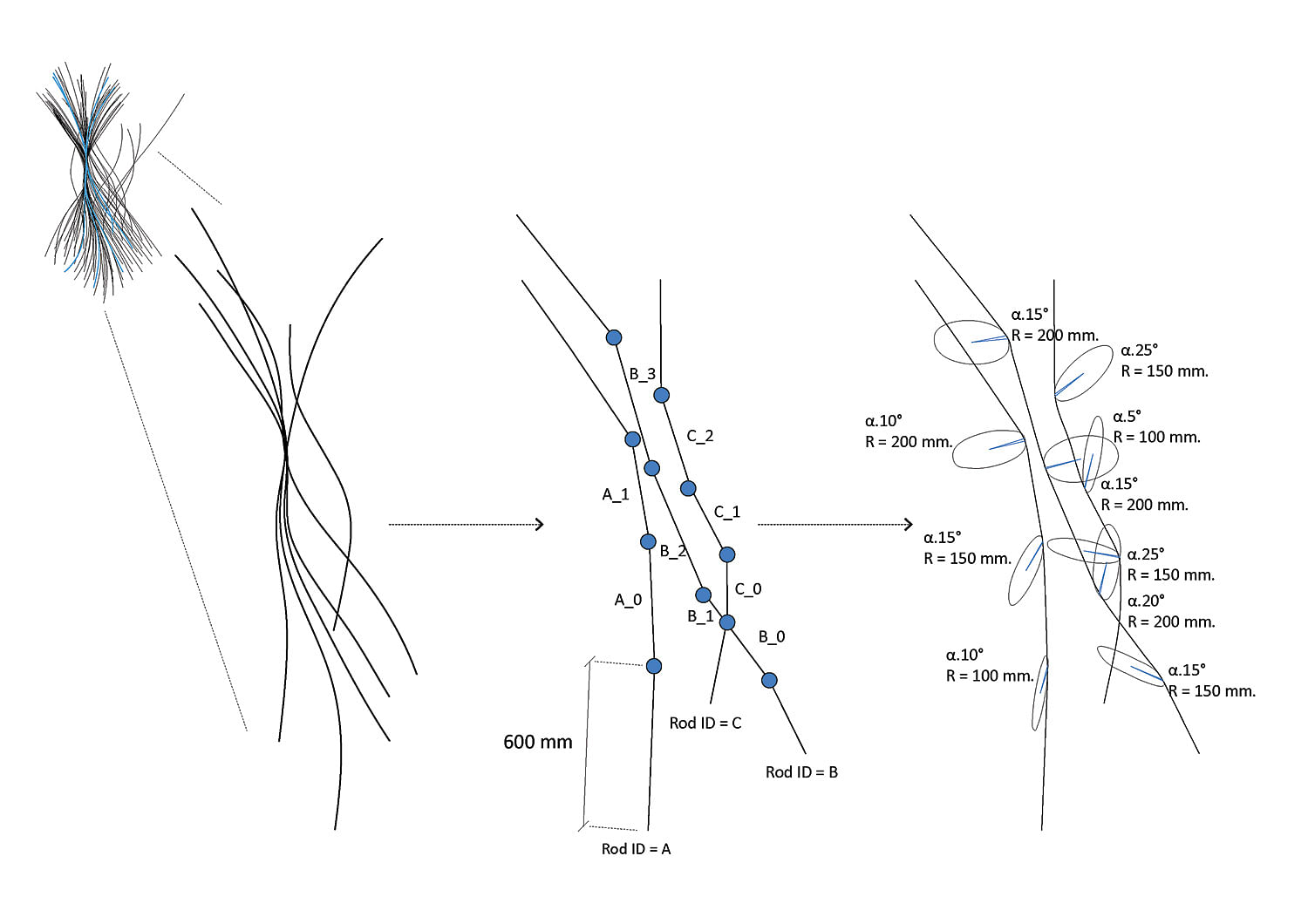
“The bending jig system comprises 3 different bending discs, with radii of 150 mm., 100mm., 50 mm and a pneumatic gripper for securing one end of the steel rod in position. In this setup, rod bending process sets up a set of constraints which have direct feedback on the computational form-finding process. Geometrical outcomes from initial bundling algorithm experiments are optimized via a custom-built Python script that evaluates the curvature of each element at specified domain intervals, finds the closest curvature value in alignment with one of the radii stated above, and rebuilds the geometry such that the final output is a series of lines and arcs with variable bending angles. This geometry serves as the steel reinforcement for the concrete structure in the future stages of design and fabrication.”
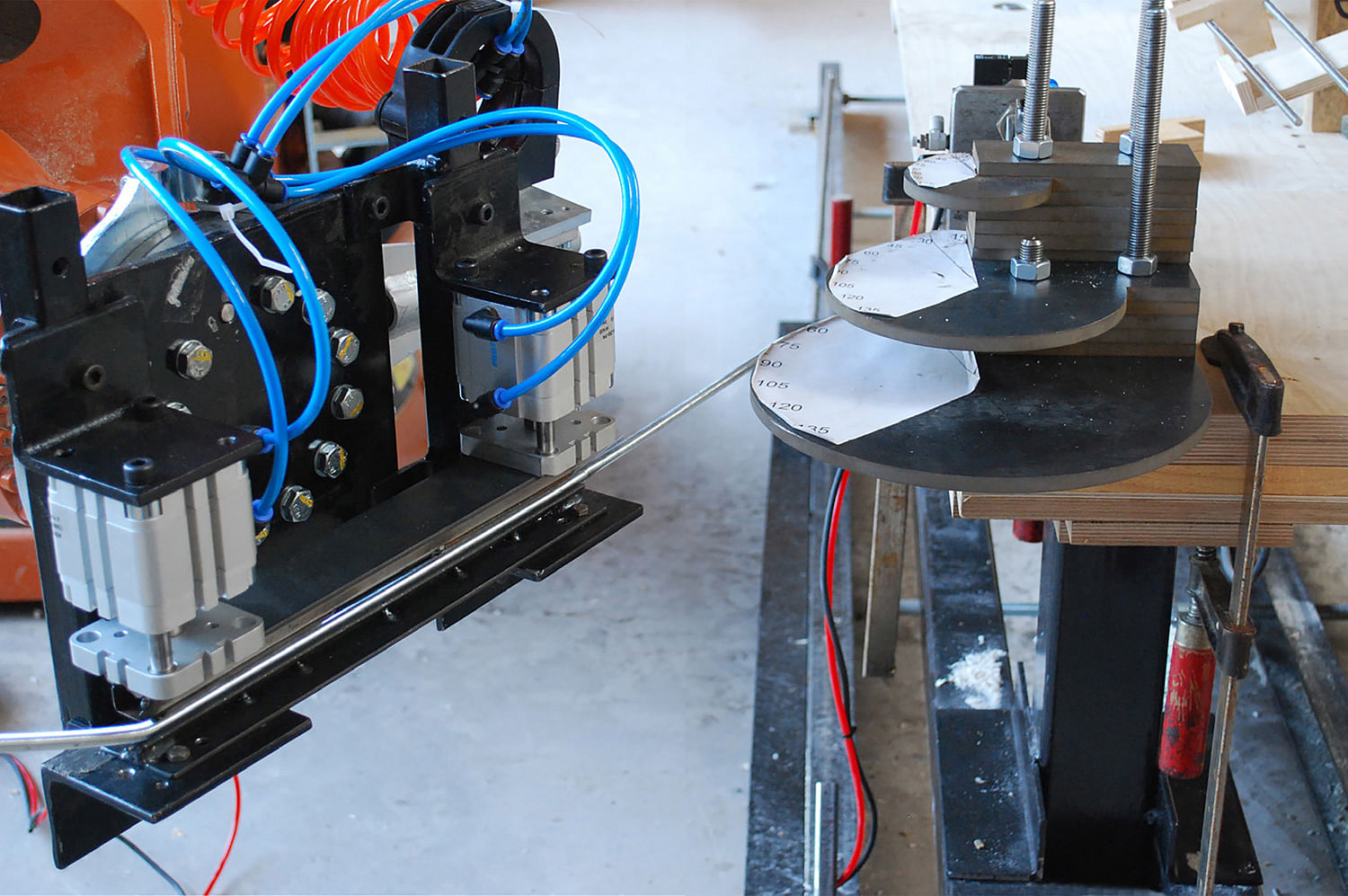
“Through the analysis of rod bending strategies in traditional manufacturing industries that are well-documented and established, the research aims to develop a novel approach by the reduction of mechanical parts for controlling the bending process and hence the desired output form. This goal is achieved by the systematic correlation of the physical parts of the bending jig system with an intelligent robotic toolpath, developed in KUKA|prc in conjunction with Python scripting. The toolpath integrates the necessary material considerations, including tolerances and steel rod spring-back values, with bending motion strategies through a series of mathematical calculations in line with physical bending experiments. More than 80 steel rods, each bearing a length of 1500 mm. and radius of 8 mm., have been robotically bent within a short period of time thanks to the speed, precision, and low tolerances of the robotic bending protocols.”

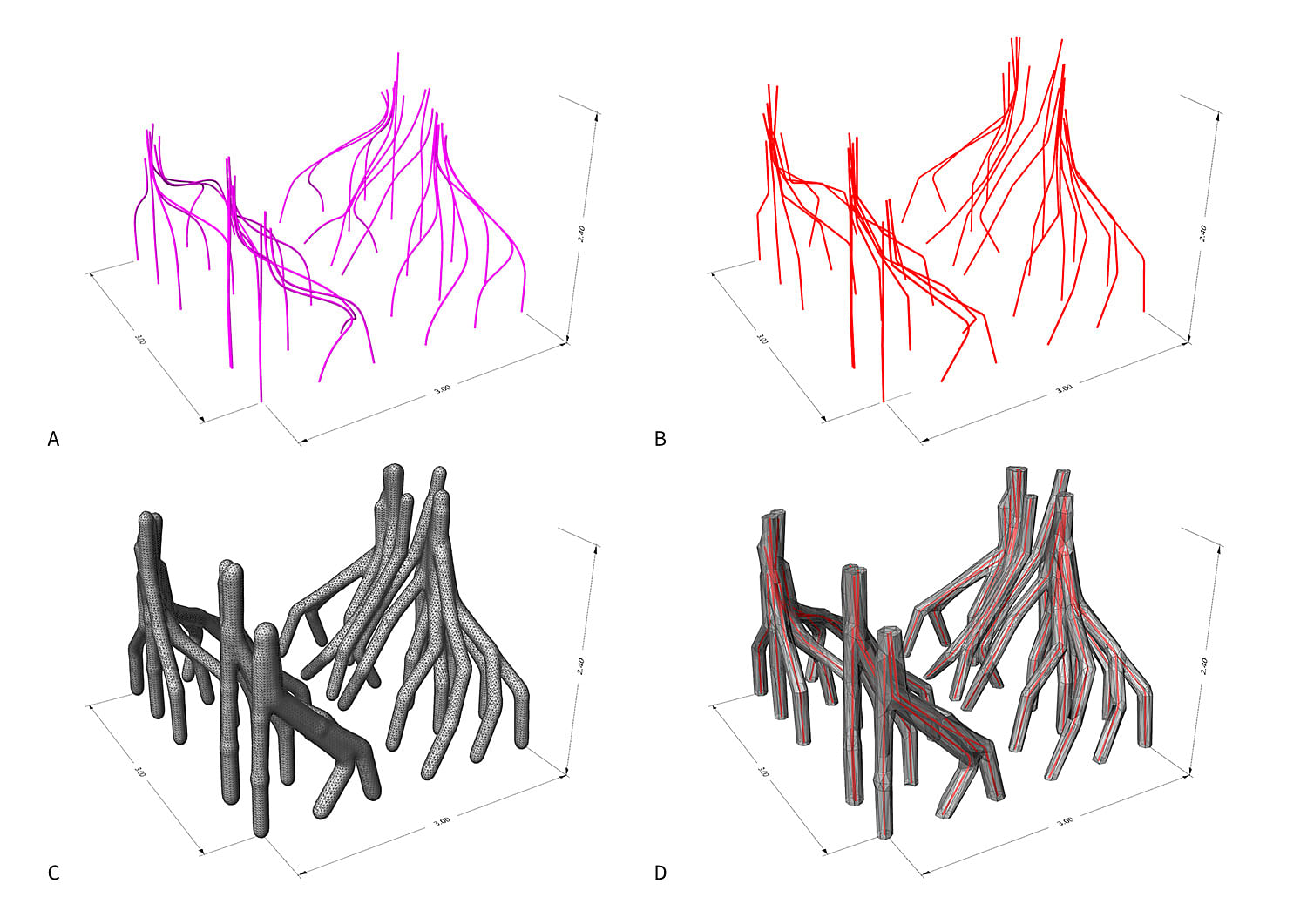
“The outcome of the initial computational phase, a series of interwoven 2-dimensional components made of lines and arcs, is given structural thickness via a meshing algorithm that generates a high-resolution mesh around the components. This mesh is further optimized and triangulated in order to create developable surfaces that can be unrolled with accuracy. The diameter of each component ranges between 100 mm. and 250 mm. according to its location in the global configuration. The 3-dimensional interwoven model is then evaluated via Finite Element Analysis (FEA) with the Grasshopper add-on Karamba. The total displacement values gained from initial FEA serve as inputs for re-adjusting the parameters of the bundling and optimization algorithm through various iterations.”
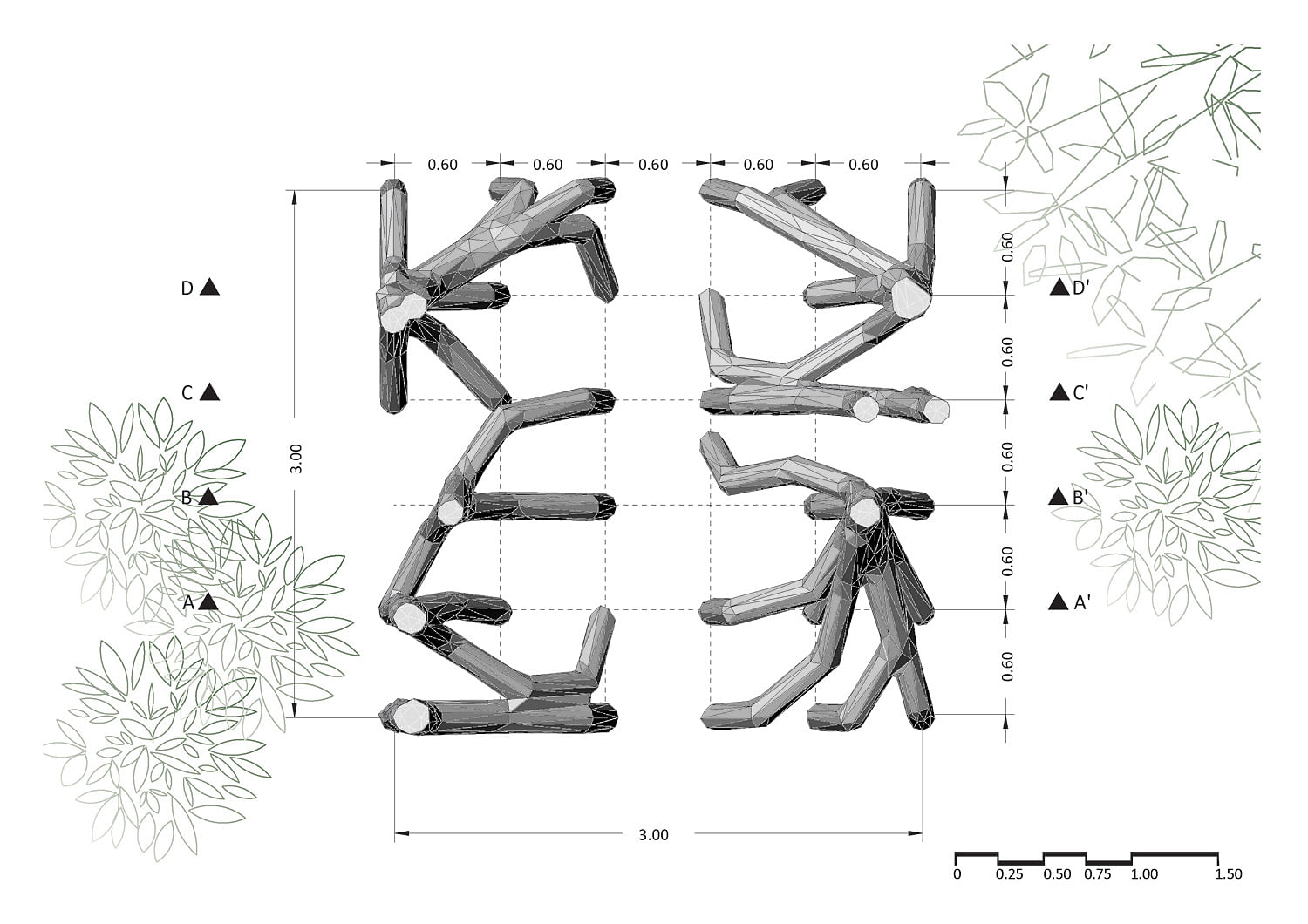
“The triangulated mesh acts as the form-work for the structure, and it is fabricated from CNC-milled 3 mm. thick Polypropylene sheets. The fabricated sheets are folded back to generate the 3d components of the interwoven structure. As the mesh has been generated directly from the geometry of the steel bent rods, the reinforcement bars and form-work for the structure match seamlessly. In the concluding stages of fabrication and assembly, a special mix of concrete with fiberglass additives has been poured inside the form-work that is supported by the robotically-bent steel rod reinforcement, allowing the concrete mix to be cast and cured within several hours. Due to the surface finish of Polypropylene form-work, it has been possible to complete the de-moulding process of the structure in a short period of time.”
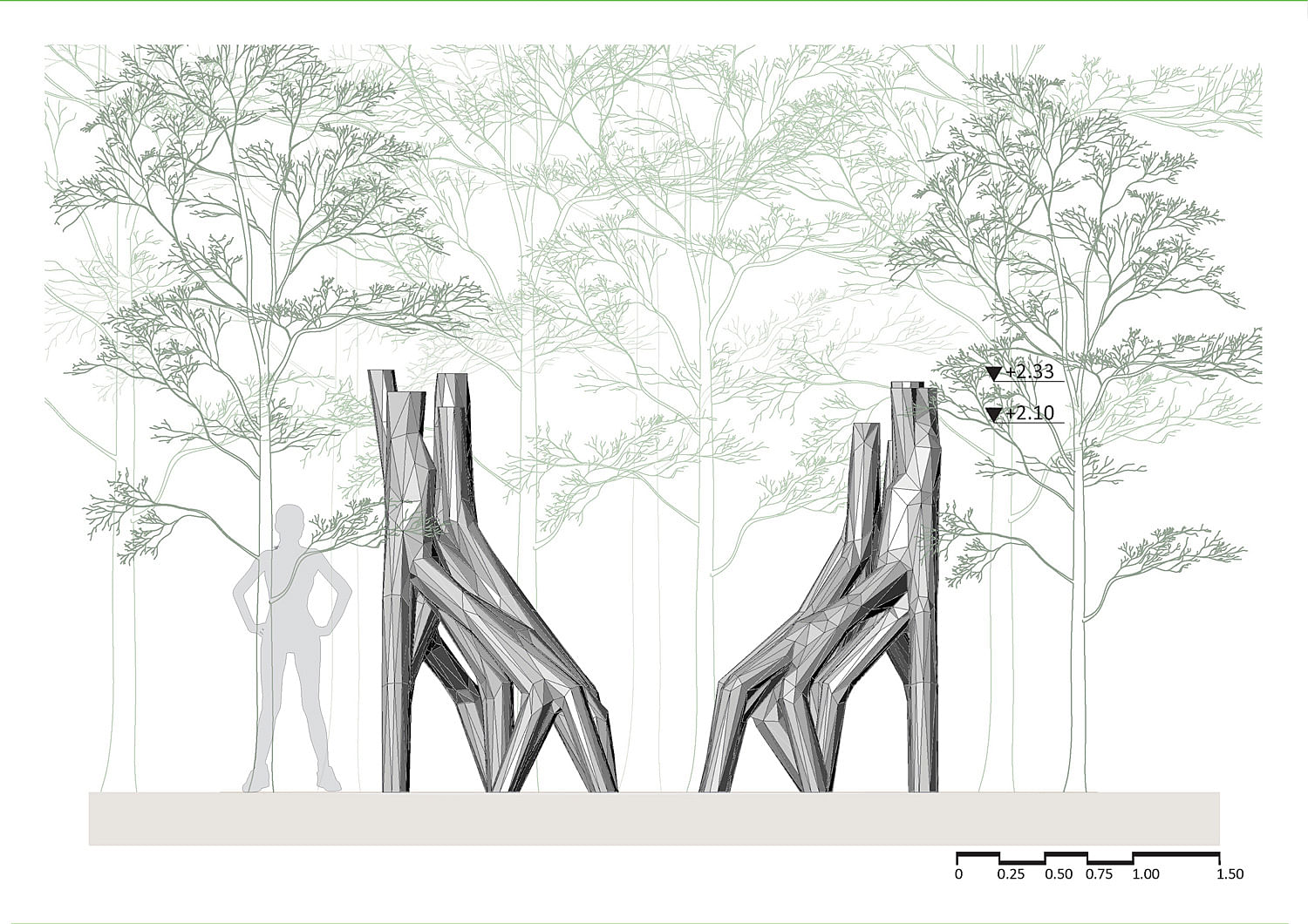

“The final configuration is characterized by a continuous network of concrete branches that support each other while creating an amorphous spatial enclosure. One of the questions raised during the design process has been the application of a form-work material that could aid in the fabrication of a complex geometrical configuration while maintaining self-supporting capacity. The use of Polypropylene has facilitated these objectives while also providing a reflective surface quality for concrete. Furthermore, the incorporation of robotic bending parameters as a driver starting from the initial stages of design development has contributed to a strong correlation between design and fabrication phases, moving away from a direct design-to-production approach.”

“The ongoing research intends to incorporate simple mechanical tools and cost-effective fabrication methods with the complexity embedded in generative form-finding processes, geometrical rationalization, and robotic tool-path creation that integrates material constraints. The key objective is to illustrate the architectural possibilities of using concrete in a non-conventional way by creating strong associations between computational design methodologies and robotic fabrication processes.”
Don't forget to check out a video of the making of Weave.X below.
Credits
Program Directors: Elif Erdine, Alexandros Kallegias
Tutors: Alexandros Kallegias, Elif Erdine, Angel Fernando Lara Moreira, Necdet Yagiz Ozkan, Suzan Ucmaklioglu
Research Collaborator: Alican Sungur
Robotics Collaborator: Pradeep Devadass
Students: Artemis Psaltoglou, Anna Rizou, Irini Sapka, Stelios Andreou, Alexandra Marantidou, Melike Culcuoglu, Deniz Ipek Ayasli, Isui Rodriguez, Roger Flores, Reese Lewis, Shang-Fang Yu, Anthony Ip, Mauricio Velarde, Kentaro Fujimoto, Josue Davila, DanielaOrellana, Erik Hoffmann, Zheng Luo, Jeffrey Novak, Veronica Ruiz, Justine Poulin
All images courtesy of AA Summer DLAB.


Share
0 Comments
Comment as :